
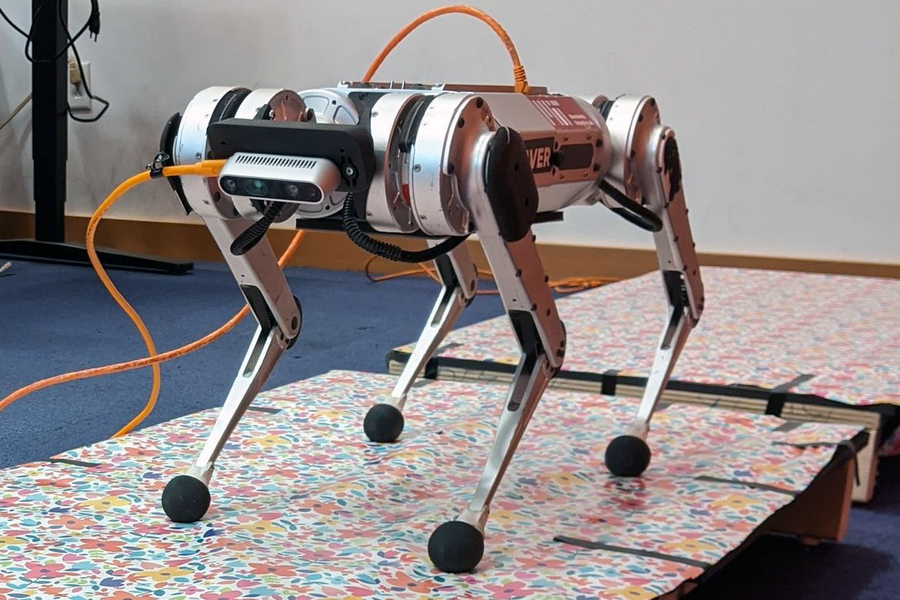
Οι ερευνητές του MIT ανέπτυξαν ένα σύστημα που βελτιώνει την ταχύτητα και την ευελιξία των ρομπότ με πόδια καθώς πηδούν σε κενά στο έδαφος. Συντελεστές: Φωτογραφία ευγενική προσφορά των ερευνητών
Του Adam Zewe | Γραφείο Ειδήσεων MIT
Ένα κλεφτό τσιτάχ διασχίζει ένα κυλιόμενο χωράφι, οριοθετώντας ξαφνικά κενά στο τραχύ έδαφος. Η κίνηση μπορεί να φαίνεται αβίαστη, αλλά το να κάνεις ένα ρομπότ να κινηθεί με αυτόν τον τρόπο είναι μια εντελώς διαφορετική προοπτική.
Τα τελευταία χρόνια, τα τετράποδα ρομπότ εμπνευσμένα από την κίνηση των τσιτάχ και άλλων ζώων έχουν κάνει μεγάλα άλματα προς τα εμπρός, ωστόσο εξακολουθούν να υστερούν σε σχέση με τα θηλαστικά τους όταν πρόκειται να ταξιδέψουν σε ένα τοπίο με γρήγορες αλλαγές υψομέτρου.
«Σε αυτές τις ρυθμίσεις, πρέπει να χρησιμοποιήσετε την όραση για να αποφύγετε την αποτυχία. Για παράδειγμα, είναι δύσκολο να αποφευχθεί η είσοδος σε ένα κενό εάν δεν μπορείτε να το δείτε. Αν και υπάρχουν κάποιες υπάρχουσες μέθοδοι για την ενσωμάτωση της όρασης στην κίνηση των ποδιών, οι περισσότερες από αυτές δεν είναι πραγματικά κατάλληλες για χρήση με αναδυόμενα ευέλικτα ρομποτικά συστήματα», λέει ο Gabriel Margolis, διδάκτορας στο εργαστήριο του Pulkit Agrawal, καθηγητής στην Επιστήμη Υπολογιστών και Εργαστήριο Τεχνητής Νοημοσύνης (CSAIL) στο MIT.
Τώρα, ο Μαργκόλης και οι συνεργάτες του έχουν αναπτύξει α σύστημα που βελτιώνει την ταχύτητα και την ευελιξία των ρομπότ με πόδια καθώς πηδούν σε κενά στο έδαφος. Το νέο σύστημα ελέγχου χωρίζεται σε δύο μέρη — ένα που επεξεργάζεται την είσοδο σε πραγματικό χρόνο από μια βιντεοκάμερα τοποθετημένη στο μπροστινό μέρος του ρομπότ και ένα άλλο που μεταφράζει αυτές τις πληροφορίες σε οδηγίες για το πώς το ρομπότ πρέπει να κινεί το σώμα του. Οι ερευνητές δοκίμασαν το σύστημά τους στο μίνι τσιτάχ του MIT, ένα ισχυρό, ευέλικτο ρομπότ που κατασκευάστηκε στο εργαστήριο του Sangbae Kim, καθηγητή μηχανολογίας.
Σε αντίθεση με άλλες μεθόδους για τον έλεγχο ενός ρομπότ με τέσσερα πόδια, αυτό το σύστημα δύο μερών δεν απαιτεί εκ των προτέρων χαρτογράφηση του εδάφους, έτσι ώστε το ρομπότ να μπορεί να πάει οπουδήποτε. Στο μέλλον, αυτό θα μπορούσε να επιτρέψει στα ρομπότ να φορτωθούν στο δάσος σε μια αποστολή αντίδρασης έκτακτης ανάγκης ή να ανέβουν μια σκάλα για να παραδώσουν φάρμακα σε ηλικιωμένους που κλείνουν.
Ο Margolis έγραψε την εργασία με τον ανώτερο συγγραφέα Pulkit Agrawal, ο οποίος είναι επικεφαλής του εργαστηρίου Improbable AI στο MIT και είναι ο Steven G. και ο Renee Finn Επίκουρος Καθηγητής Ανάπτυξης Σταδιοδρομίας στο Τμήμα Ηλεκτρολόγων Μηχανικών και Επιστήμης Υπολογιστών. Καθηγητής Sangbae Kim στο Τμήμα Μηχανολόγων Μηχανικών στο MIT. και συμφοιτητές μεταπτυχιακούς φοιτητές Tao Chen και Xiang Fu στο MIT. Άλλοι συν-συγγραφείς περιλαμβάνουν τον Kartik Paigwar, μεταπτυχιακό φοιτητή στο Πολιτειακό Πανεπιστήμιο της Αριζόνα. και ο Donghyun Kim, επίκουρος καθηγητής στο Πανεπιστήμιο της Μασαχουσέτης στο Amherst. Η εργασία θα παρουσιαστεί τον επόμενο μήνα στο Συνέδριο για την Εκμάθηση Ρομπότ.
Είναι όλα υπό έλεγχο
Η χρήση δύο χωριστών ελεγκτών που συνεργάζονται καθιστά αυτό το σύστημα ιδιαίτερα καινοτόμο.
Ένας ελεγκτής είναι ένας αλγόριθμος που θα μετατρέψει την κατάσταση του ρομπότ σε ένα σύνολο ενεργειών που πρέπει να ακολουθήσει. Πολλοί τυφλοί ελεγκτές – αυτοί που δεν ενσωματώνουν όραση – είναι στιβαροί και αποτελεσματικοί αλλά επιτρέπουν μόνο στα ρομπότ να περπατούν σε συνεχές έδαφος.
Η όραση είναι μια τόσο περίπλοκη αισθητηριακή είσοδος για επεξεργασία που αυτοί οι αλγόριθμοι δεν είναι σε θέση να το χειριστούν αποτελεσματικά. Τα συστήματα που ενσωματώνουν όραση συνήθως βασίζονται σε έναν «χάρτη ύψους» του εδάφους, ο οποίος πρέπει είτε να προκατασκευαστεί είτε να δημιουργηθεί εν κινήσει, μια διαδικασία που είναι συνήθως αργή και επιρρεπής σε αποτυχία εάν ο χάρτης ύψους είναι εσφαλμένος.
Για να αναπτύξουν το σύστημά τους, οι ερευνητές πήραν τα καλύτερα στοιχεία από αυτούς τους στιβαρούς, τυφλούς ελεγκτές και τα συνδύασαν με μια ξεχωριστή μονάδα που χειρίζεται την όραση σε πραγματικό χρόνο.
Η κάμερα του ρομπότ καταγράφει εικόνες βάθους του επερχόμενου εδάφους, οι οποίες τροφοδοτούνται σε έναν ελεγκτή υψηλού επιπέδου μαζί με πληροφορίες για την κατάσταση του σώματος του ρομπότ (γωνίες αρθρώσεων, προσανατολισμός σώματος κ.λπ.). Ο ελεγκτής υψηλού επιπέδου είναι α νευρικό σύστημα που «μαθαίνει» από την εμπειρία.
Αυτό το νευρωνικό δίκτυο εξάγει μια τροχιά στόχου, την οποία ο δεύτερος ελεγκτής χρησιμοποιεί για να βρει ροπές για καθεμία από τις 12 αρθρώσεις του ρομπότ. Αυτός ο ελεγκτής χαμηλού επιπέδου δεν είναι νευρωνικό δίκτυο και αντ’ αυτού βασίζεται σε ένα σύνολο συνοπτικών, φυσικών εξισώσεων που περιγράφουν την κίνηση του ρομπότ.
«Η ιεραρχία, συμπεριλαμβανομένης της χρήσης αυτού του ελεγκτή χαμηλού επιπέδου, μας δίνει τη δυνατότητα να περιορίσουμε τη συμπεριφορά του ρομπότ ώστε να συμπεριφέρεται καλύτερα. Με αυτόν τον ελεγκτή χαμηλού επιπέδου, χρησιμοποιούμε καλά καθορισμένα μοντέλα στα οποία μπορούμε να επιβάλουμε περιορισμούς, κάτι που συνήθως δεν είναι δυνατό σε ένα δίκτυο που βασίζεται στη μάθηση», λέει ο Margolis.
Διδασκαλία του δικτύου
Οι ερευνητές χρησιμοποίησαν τη μέθοδο δοκιμής και λάθους γνωστή ως ενισχυτική μάθηση για να εκπαιδεύσουν τον ελεγκτή υψηλού επιπέδου. Διεξήγαγαν προσομοιώσεις του ρομπότ που έτρεχε σε εκατοντάδες διαφορετικά ασυνεχή εδάφη και το αντάμειψε για επιτυχημένες διελεύσεις.
Με τον καιρό, ο αλγόριθμος έμαθε ποιες ενέργειες μεγιστοποίησαν την ανταμοιβή.
Στη συνέχεια έχτισαν ένα φυσικό, διάκενο έδαφος με μια σειρά από ξύλινες σανίδες και δοκίμασαν το σχέδιο ελέγχου τους χρησιμοποιώντας το μίνι τσιτάχ.
«Ήταν σίγουρα διασκεδαστικό να δουλέψω με ένα ρομπότ που σχεδιάστηκε στο MIT από ορισμένους συνεργάτες μας. Το mini cheetah είναι μια εξαιρετική πλατφόρμα επειδή είναι αρθρωτό και είναι κατασκευασμένο κυρίως από ανταλλακτικά που μπορείτε να παραγγείλετε μέσω Διαδικτύου, οπότε αν θέλαμε μια νέα μπαταρία ή κάμερα, ήταν απλώς ένα απλό θέμα να το παραγγείλουμε από έναν κανονικό προμηθευτή και, με λίγο λίγη βοήθεια από το εργαστήριο του Sangbae, εγκαθιστώντας το», λέει ο Margolis.
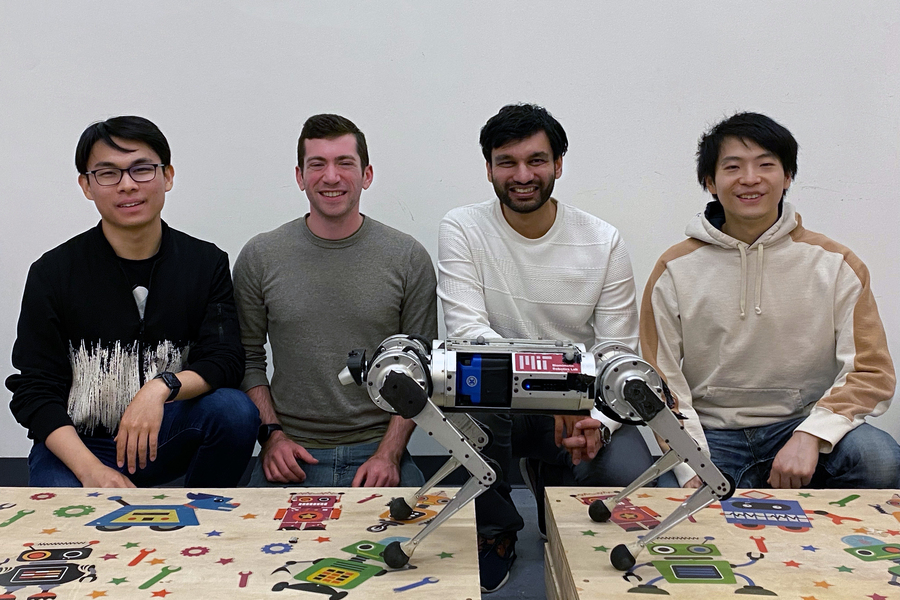
Από αριστερά προς τα δεξιά: διδακτορικοί φοιτητές Tao Chen και Gabriel Margolis. Pulkit Agrawal, ο Steven G. και ο Renee Finn Επίκουρος Καθηγητής Ανάπτυξης Σταδιοδρομίας στο Τμήμα Ηλεκτρολόγων Μηχανικών και Επιστήμης Υπολογιστών. και διδάκτορας Xiang Fu. Συντελεστές: Φωτογραφία ευγενική προσφορά των ερευνητών
Η εκτίμηση της κατάστασης του ρομπότ αποδείχθηκε πρόκληση σε ορισμένες περιπτώσεις. Σε αντίθεση με την προσομοίωση, οι αισθητήρες του πραγματικού κόσμου αντιμετωπίζουν θόρυβο που μπορεί να συσσωρευτεί και να επηρεάσει το αποτέλεσμα. Έτσι, για ορισμένα πειράματα που περιελάμβαναν τοποθέτηση ποδιών υψηλής ακρίβειας, οι ερευνητές χρησιμοποίησαν ένα σύστημα καταγραφής κίνησης για να μετρήσουν την πραγματική θέση του ρομπότ.
Το σύστημά τους ξεπέρασε τις επιδόσεις άλλων που χρησιμοποιούν μόνο ένα χειριστήριο και το μίνι τσιτάχ διέσχισε με επιτυχία το 90 τοις εκατό των εδαφών.
«Μια καινοτομία του συστήματός μας είναι ότι προσαρμόζει το βάδισμα του ρομπότ. Εάν ένας άνθρωπος προσπαθούσε να πηδήξει σε ένα πολύ μεγάλο κενό, μπορεί να ξεκινούσε τρέχοντας πολύ γρήγορα για να αυξήσει την ταχύτητα και στη συνέχεια μπορεί να βάλει και τα δύο πόδια μαζί για να έχει ένα πραγματικά δυνατό άλμα κατά μήκος του κενού. Με τον ίδιο τρόπο, το ρομπότ μας μπορεί να προσαρμόσει τους χρονισμούς και τη διάρκεια των επαφών του ποδιού του για να διασχίζει καλύτερα το έδαφος», λέει ο Margolis.
Πηδώντας έξω από το εργαστήριο
Ενώ οι ερευνητές μπόρεσαν να αποδείξουν ότι το σύστημα ελέγχου τους λειτουργεί σε εργαστήριο, έχουν ακόμη πολύ δρόμο μπροστά τους για να μπορέσουν να αναπτύξουν το σύστημα στον πραγματικό κόσμο, λέει ο Margolis.
Στο μέλλον, ελπίζουν να τοποθετήσουν έναν πιο ισχυρό υπολογιστή στο ρομπότ, ώστε να μπορεί να κάνει όλους τους υπολογισμούς του επί του σκάφους. Θέλουν επίσης να βελτιώσουν τον εκτιμητή κατάστασης του ρομπότ για να εξαλείψουν την ανάγκη για το σύστημα καταγραφής κίνησης. Επιπλέον, θα ήθελαν να βελτιώσουν τον ελεγκτή χαμηλού επιπέδου, ώστε να μπορεί να εκμεταλλευτεί το πλήρες εύρος κίνησης του ρομπότ και να βελτιώσει τον ελεγκτή υψηλού επιπέδου, ώστε να λειτουργεί καλά σε διαφορετικές συνθήκες φωτισμού.
«Είναι αξιοσημείωτο να βλέπουμε την ευελιξία των τεχνικών μηχανικής εκμάθησης ικανών να παρακάμπτουν προσεκτικά σχεδιασμένες ενδιάμεσες διαδικασίες (π.χ. εκτίμηση κατάστασης και σχεδιασμός τροχιάς) στις οποίες έχουν βασιστεί τεχνικές βασισμένες σε μοντέλα αιώνων», λέει ο Kim. «Είμαι ενθουσιασμένος για το μέλλον των κινητών ρομπότ με πιο στιβαρή επεξεργασία όρασης που έχει εκπαιδευτεί ειδικά για μετακίνηση».
Η έρευνα υποστηρίζεται, εν μέρει, από το Improbable AI Lab, το Biomimetic Robotics Laboratory, το NAVER LABS και το DARPA Machine Common Sense Program του MIT.
ετικέτες: βιο-εμπνευσμένο, γ-Έρευνα-Καινοτομία

Ειδήσεις MIT